PiKoder Home » PiKoder Android apps overview »
Android App for joystick R/C with USB2PPM PiKoder
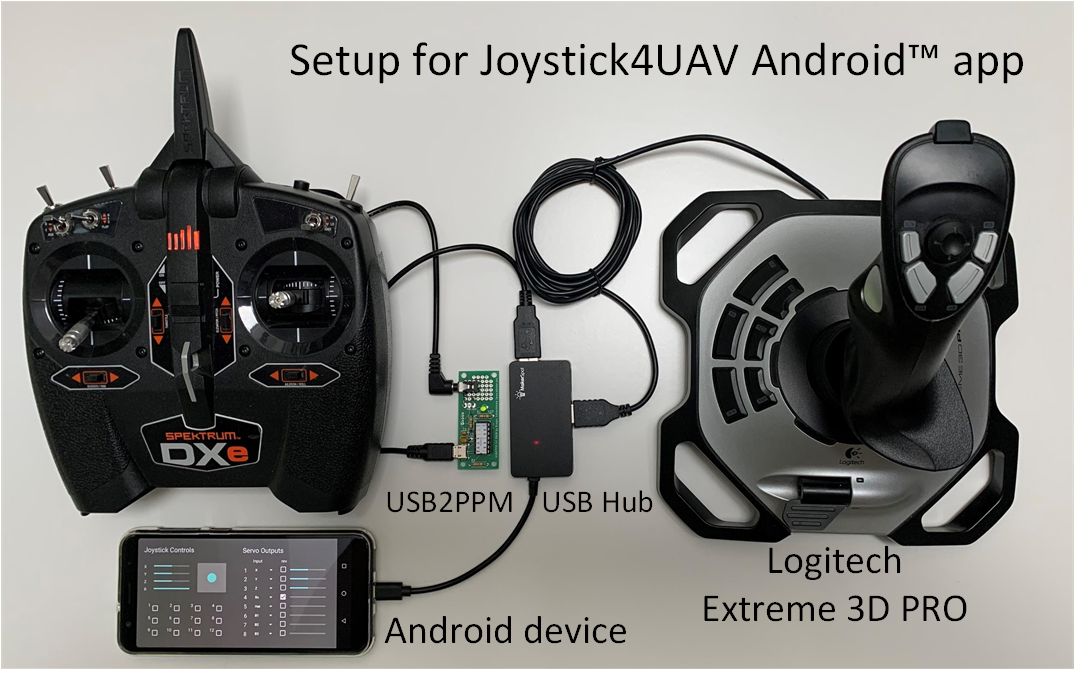
With the Joystick4UAV app available in in the Google Play Store you can control your multicopter with a joystick. The app is based on the Joystick2PPM app and has been extended specially for the use with a multicopter by supporting six flight modes. Please refer to the picture below for the system setup. Please note that this app currently only supports a Logitech Extreme 3D PRO joystick and a USB2PPM PiKoder.
System setup
User interface
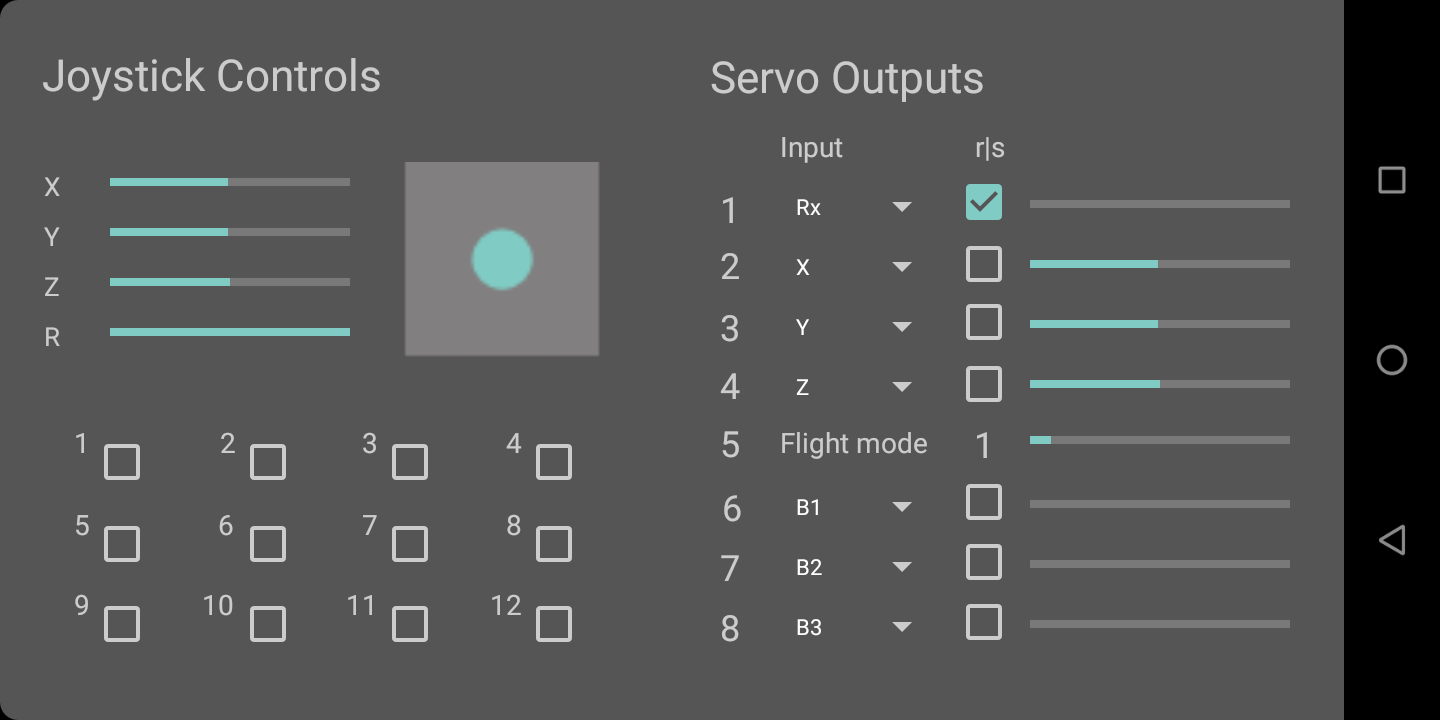
The user interface is intuitive and allows for smooth operation. the joystick and the USB2PPM are automatically recognized when starting the app. You would have to grant access to the respective USB ports when running the app for the first time.
The four joystick axes are mapped into channels one to four follwing the usual setup in flight controllers. You could of course change the order of the channles to your liking or the needs of your specific application. The channels can be inverted by checking the respective box.

The flight mode is mapped into channel five. A total of six flight modes are supported. For the selection of a flight mode push one of the buttons 7 .. 12 (see picture to the right) whereby button 7 will activate flight mode 1, button 8 flight mode 2 and so on. The current flight mode is displayed numerically ("1" in the image above).
The remaining buttons one to six and the Hat switch are available for special functions and can be mapped into the remaining channels six to eight to cater for your additional needs. If you were to activate the box associated to the channel then the button will act as an on-off-switch.
Please refer to the USB2PPM Kit page for more information. The Joystick4UAV app is supported by USB2PPM firmware version 2.0 and above.
